QuadCrawlerAI
ADCRAIBT QuadCrawlerAI
製品HP
組み立て手順書はこちら!
プログラミングアプリ「つくるっち」詳細はこちら!
クアッドクローラーAIでROSに対応する方法
クラウドファンディング企画として大好評を頂いた「クアッド・クローラー」をベースに、大幅なブラッシュアップ&機能向上を果たしました。
ドライバーのみで組み立てられる簡単なキット組立やユーモラスな一連の動作はそのままに、映像認識によるAI制御機能が追加。
障害物を避ける等の基本的な使い方から、これまでのルートをもとにマッピングを行い迷路からの脱出を果たす等、AI制御のイロハが学べます。

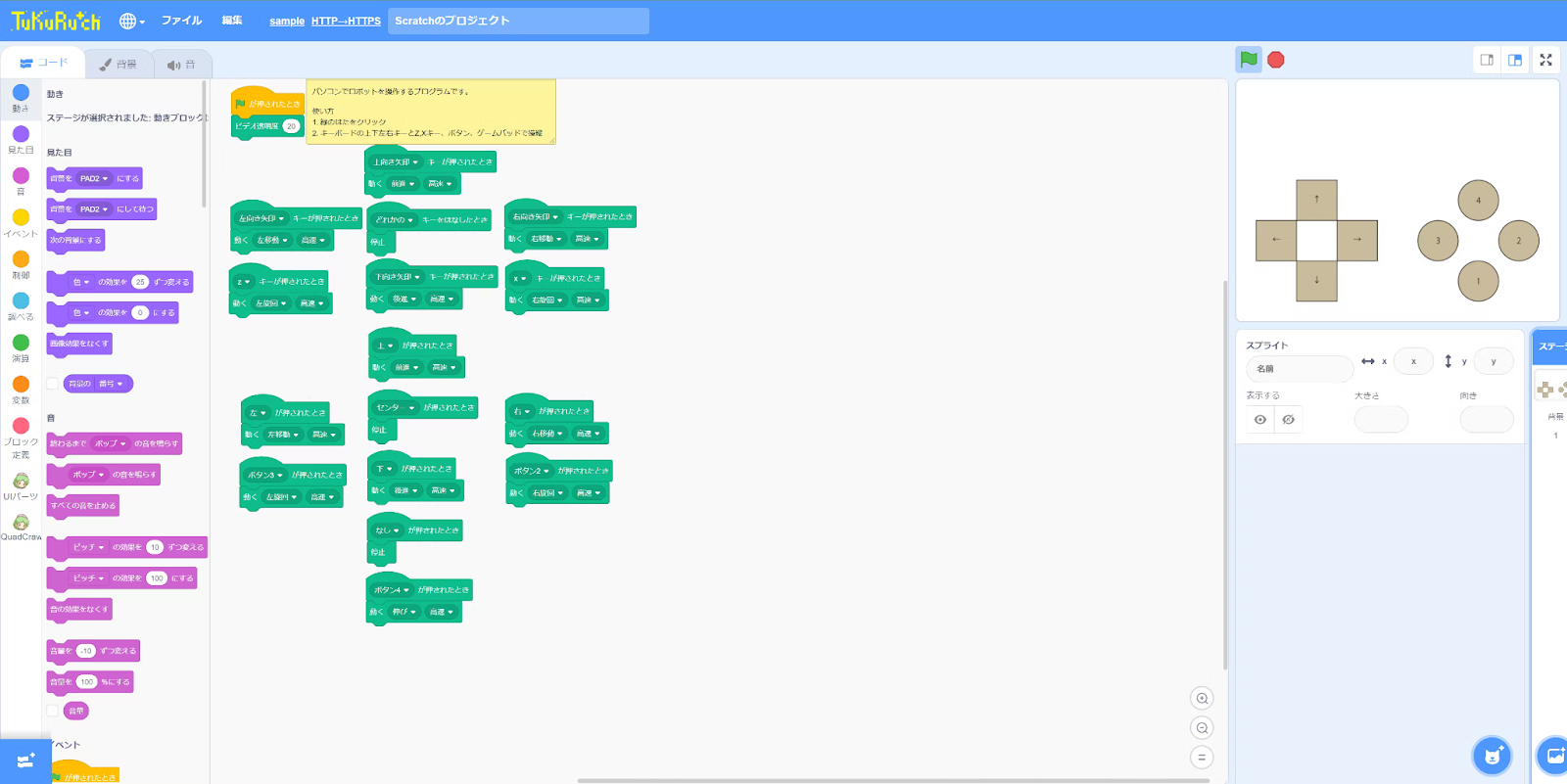
プログラミングアプリにはスクラッチ言語開発環境「つくるっち」を引き続き採用。
ブロックプログラミングでわかりやすく取り組むことができます。
脚部パーツや基板との取付部分にも大幅な改良を行い、より作りやすく、より大きな動きを実現することができました。

新たなクアッド・クローラーAIの製作でロボット工学分野への理解を深めてみませんか。
基本仕様
【搭載マイコン】ESP32-WROOM-32E
【外部インターフェース】赤外線受光部、USB Type-C(2.0)、サーボモータ予備出力x4、GROVEコネクタ(UARTx1、I2Cx1)
【周辺機能】カメラ、超音波センサー、ブザー、フルカラーLEDx8、汎用タクトスイッチx1、リセット用タクトスイッチx1
【電源】単三アルカリ又はニッケル水素電池x4(電池は付属していません)、DCジャック(DC5V専用)
【プログラミング環境】専用アプリ (対応OS Windows) or Arduino IDE(対応OS Windows,MAC OS,他)
【駆動部】サーボモータ x 8(PCA9685にて制御)
【本体重量】約210g
【本体サイズ】W190×H90×D190mm
【付属品】リモコン、説明書
【別途必要物】プラスドライバー2本(大小)
【使用温度】 0 ~ 40℃(結露なきこと)
【生産国】Made in Japan