クアッドクローラー プログラミング
アプリ版 つくるっち アプリ版はWindowsパソコン、MACパソコン、ChromeBookのChromeブラウザで動作します。サンプルプログラム
ロボットソフトの更新
一度だけロボットソフトを更新する必要があります。- ロボットをUSBケーブルでパソコンにつなぎます。
- 新規プログラムを開き、[QuadCrarwler] - [QuadCrarwler書き込み] を押します。

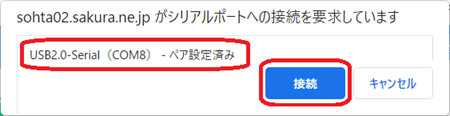
- 下記画面が出るのでCOMxを選択して [接続]。
アプリからロボットを操作する
- 新規プログラムを開き、ロボットのスイッチを入れ [QuadCrarwler] - 緑のボタンのどれかを押します。

- 下記画面が出るのでCOMxを選択して [接続]。ロボットが動作します。
 を押すとロボットの動きが止まります。
を押すとロボットの動きが止まります。
リモコンを押したときブザーを鳴らすプログラムを作る
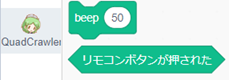
- 図の通りに [制御] - [ずっと] と [もし なら]、[QuadClawler] - [beep 50] と [リモコンボタンが押された]
を並べます。

 →
→ 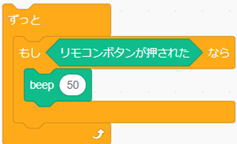
- ブロックの端をクリックしてブロックのまわりが黄色い状態にします。この状態でロボットに向けリモコンのボタンを押すとブザーが鳴ります。
